 Para esclarecer os propósitos do projeto e sua relevância comercial, identificamos uma missão de intervenção com um ROV. A missão não é tecnicamente difícil de automatizar, mas em caso de sucesso, a tecnologia desenvolvida poderá ter um impacto substancial na operação e nos sistemas comerciais. A missão não é atualmente encontrada em atividades offshore, embora algumas partes sejam executadas manualmente e com dificuldade. O objetivo do projeto será automatizar as diferentes fases dessa missão para reduzir o tempo e os erros de execução, reduzindo também os custos.
Para esclarecer os propósitos do projeto e sua relevância comercial, identificamos uma missão de intervenção com um ROV. A missão não é tecnicamente difícil de automatizar, mas em caso de sucesso, a tecnologia desenvolvida poderá ter um impacto substancial na operação e nos sistemas comerciais. A missão não é atualmente encontrada em atividades offshore, embora algumas partes sejam executadas manualmente e com dificuldade. O objetivo do projeto será automatizar as diferentes fases dessa missão para reduzir o tempo e os erros de execução, reduzindo também os custos.
A situação que consideraremos usa uma classe de ROV de grande porte e um toolskid com um manipulador em um arranjo que permita a realização de tarefas típicas de grande destreza tais como soldagem, posicionamento de um sensor para Testes Não Destrutivos (NDT) para inspeção de soldas nas interseções de estruturas offshore, ou esmerilhamento de rachaduras nas soldas. Tais tarefas são atualmente realizadas com grande dificuldade por mergulhadores. Um aumento no grau de automação poderia possivelmente facilitar a execução destas tarefas além de ser absolutamente necessário para operações em águas profundas sem a presença de mergulhadores.
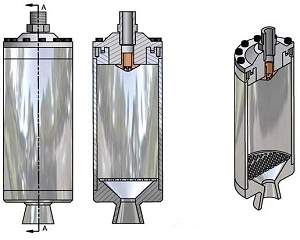
A configuração imaginada também permite o acoplamento do ROV à estrutura . O ROV usa três pés aderentes, dois em sua base e um localizado na parte frontal superior. A água do mar é bombeada a partir das patas de sucção elastoméricas localizadas nas pontas das pernas de modo que a pressão da água do mar mantenha cada pé firmemente agarrado na estrutura. Cada perna possui 2 juntas rotacionais na base e uma junta primática. Inicialmente as pernas são comandadas manualmente por um controlador tipo bang-bang de modo a posicionar precisamente o ROV, depois o sistema é travado de modo a garantir uma docagem mais rígida. As tarefas submarinas realizadas com manipuladores podem ser classificadas em dois tipos principais. O primeiro tipo pode não envolver contatos ou apenas contatos leves, tais como inspeção visual ou contato mecânico de um sensor. Aqui a principal causa dos distúrbios na posição do veículo voando livremente são as correntes, marés ou ondas, em caso de águas rasas, ou a força de arraste do cabo umbilical. Para esta classe de tarefas uma possível solução é um sistema de posicionamento dinâmico do ROV baseado em um braço mecânico passivo (BMP) ou em um sistema de medição inercial. Um protótipo do sistema baseado em um BMP foi recentemente desenvolvido e testado na COPPE/UFRJ com a colaboração e o suporte financeiro do CENPES/PETROBRAS.
O segundo tipo de tarefas envolve forças de reação consideráveis devido ao contato mecânico, tais como esmerilhamento, furação, etc. O ROV onde o manipulador é montado também está sujeito aos distúrbios causados pelas correntes, marés, ondas e força de arraste do umbilical, o que aumenta a deformação do sistema de acoplamento baseado em pés aderentes e, consequentemente, aumentando o erro total na posição do braço manipulador. Para estas tarefas pesadas, que não podem ser feitas com um veículo voando livremente, a ideia é usar as pernas de docagem – as quais são comandadas manualmente até o ROV estar em posição apropriada para a docagem, quando são então travadas – em modo realimentado, de modo a produzir um sistema de suspensão ativo.
Esta missão apresenta alguns desafios tecnológicos: Programação da missão em modo automático no veículo, incluindo diagnose de erro. Medição do movimento relativo do veículo em relação à estrutura. Controle preciso em malha fechada do sistema dinâmico ROV/manipulador/pés aderentes imediatamente antes da docagem, em presença de correntezas e distúrbios causados pelo cabo umbilical. Controle em malha fechada do manipulador em contato com a estrutura enquanto o ROV está voando. Escolha dos locais para cocagem na estrutura. Ajuste on line da relação entre a complacência e a acurácia na posição do manipulador de acordo com a atividade que está sendo executada (e.g., o esmerilhamento produz grandes forças de reação que podem danificar uma perna muito rígida. Um NDT, contudo, produz menos distúrbios mas requer uma docagem suficientemente rígida para garantir uma acurácia milimétrica).
Nascido na cidade de Fukien, na Província de Hunan, na China, o Prof. Liu Hsu chegou ao Brasil, juntamente com sua família, no início dos anos 50, fixando residência em Curitiba, no Paraná. Fascinado pelo mar desde criança, Liu pensou num primeiro momento em cursar biologia marinha. “Mas infelizmente tive que deixar os sonhos de lado e fiz uma opção mais realista. Então decidi estudar engenharia eletrônica”, lembra o professor. Atualmente o Prof. Liu, é um dos pesquisadores mais reconhecidos na área de robótica e representa o Brasil no International Advanced Robotics Programm (IARP), que tem como países membros Estados Unidos, Inglaterra, França, Japão, Coréia, Alemanha, China, entre outros. De volta ao Brasil, em 1975, após o doutorado na França, ingressou na COPPE, no Programa de Engenharia Mecânica, onde permaneceu até 1983, quando pediu transferência para o Programa de Engenharia Elétrica.
Fonte:
http://www.coppe.ufrj.br/recope/tecsub/robotica.htm
http://www.planeta.coppe.ufrj.br/perfil/perfil000005.html
acesso em março de 2002
http://www.planeta.coppe.ufrj.br/perfil/perfil000005.html
acesso em dezembro de 2002