O convênio entre a Coppe e a Petrobrás rendeu bons frutos. A presente invenção refere-se a um motor elétrico submersível a ser empregado na propulsão de veículos tripulantes ou de operação remota (ROV), subaquáticos ou de superfície, ou no bombeamento de fluidos, este motor sendo aberto em suas extremidades de modo a permitir a passagem do fluido a ser impulsionado por seu interior e apresentando rotor em forma de anel ligado ao eixo pelas próprias pás do sistema propulsor. Normalmente os motores elétricos utilizados na propulsão de veículos subaquáticos, como por exemplo veículos submarinos de operação remota, como aqueles usados na inspeção e manutenção de poços de petróleo em águas profundas, são construídos de forma completamente vedada, na qual o motor gira imerso em um fluido eletricamente isolante. Esta concepção busca solucionar os problemas inerentes a altas pressões e evitar acesso de água aos componentes internos do motor.
O convênio entre a Coppe e a Petrobrás rendeu bons frutos. A presente invenção refere-se a um motor elétrico submersível a ser empregado na propulsão de veículos tripulantes ou de operação remota (ROV), subaquáticos ou de superfície, ou no bombeamento de fluidos, este motor sendo aberto em suas extremidades de modo a permitir a passagem do fluido a ser impulsionado por seu interior e apresentando rotor em forma de anel ligado ao eixo pelas próprias pás do sistema propulsor. Normalmente os motores elétricos utilizados na propulsão de veículos subaquáticos, como por exemplo veículos submarinos de operação remota, como aqueles usados na inspeção e manutenção de poços de petróleo em águas profundas, são construídos de forma completamente vedada, na qual o motor gira imerso em um fluido eletricamente isolante. Esta concepção busca solucionar os problemas inerentes a altas pressões e evitar acesso de água aos componentes internos do motor.
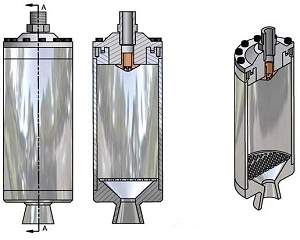
Esses motores possuem um eixo no qual em uma das extremidades é colocado o propulsor (hélice). Este conjunto motor/propulsor é posicionado dentro de um tubulão para melhoria do desempenho hidrodinâmico. Um dos aspectos importantes da propulsão de veículos subaquáticos é que o peso do motor/hélice/tubulão seja minimizado enquanto a potência é maximizada. Essa otimização da relação potência/peso é importante para assegurar a maior mobilidade possível ao veículo. O tipo de construção citado apresenta limitação decorrente do peso considerável dos componentes, normalmente metálicos, de vedação e de ligação do motor ao eixo, limitando a maximização da relação potência/peso. Existe ainda uma segunda desvantagem associada às características de construção dos motores convencionais. Como a hélice é colocada em uma das extremidades do eixo é importante que o comprimento de suas pás seja maior que o raio do motor para minimizar o efeito de sombra do motor quando a propulsão é feita em um sentido ou outro.
Por outro lado, hélices de pás longas são eficientes do ponto de vista de propulsão em baixas rotações. Motores de alta potência e baixa rotação são obtidos com o aumento do número de polos e consequente aumento do diâmetro do motor. Isto é, as condições para otimização do sistema motor/hélice não são favoráveis, uma vez que o aumento do comprimento da hélice para evitar a sombra do motor exige um aumento do diâmetro do mesmo. Para se aumentar a relação potência/peso melhorar a refrigeração e evitar o problema da sombra a presente invenção propõe uma nova estrutura motor/propulsor, em que a estrutura do motor é totalmente aberta, isto é, o fluido no qual está imerso (normalmente a água) tem contato direto com o rotor e com o estator, e no fato do propulsor ser colocado dentro do rotor, sendo este em forma de anel. As próprias pás da hélice fixam o rotor ao eixo do motor. Com esta estrutura o problema de sombra do motor sobre a hélice fica totalmente eliminado.
As pás da hélice nesta circunstância, tendem a ser curtas, sendo mais eficiente em altas rotações, o que não é desvantajoso por ser fácil obter-se alto torque e alta potência em rotações elevadas, inclusive melhorando-se a relação potência/peso. Essa relação é maximizada, ainda, pela eliminação das tampas laterais de vedação do motor e de boa parte do ferro de ligação do rotor ao eixo dos motores convencionais, que na presente invenção dão lugar ao propulsor. Além disso as próprias características de construção do motor objeto da patente asseguram seu bom desempenho hidrodinâmico, eliminando-se dessa forma a necessidade de existência de tubulão associado ao conjunto. A refrigeração fica acentuadamente melhorada em razão do contato direto com o fluido no qual está imerso. O rotor, o estator e demais componentes metálicos em contato com a água devem ser revestidos com material anticorrosivo, como teflon, resina, etc. Além dos ganhos relativos á diminuição do peso e eliminação da sombra esta nova estrutura do motor ainda garante melhor refrigeração do motor/estator, possibilitando novamente um aumento da relação potência/peso.
Desde 1977, a Petrobrás e UFRJ vem realizando pesquisas em conjunto através de convênios. Em 1986 foi criado o Núcleo de Pesquisas Avançadas em estruturas para Exploração de Recursos do Mar, tendo em sua estrutura o Laboratório de Métodos Computacionais em Engenharia. Em 1989 encontravam se em vigor dois contratos, iniciados sob a coordenação geral do prof. Lobo Carneiro. Um dos projetos objetiva o desenvolvimento de robôs submarinos de controle remoto, independente do outro projeto conduzido por firma especializada em equipamentos marinhos para a Petrobrás. Segundo o coordenador do Núcleo de Robótica da UFRJ, prof. Luiz Belivaqua, os VORs marinhos são divididos em duas categorias principais: os de menor porte dotados de fonte de iluminação e câmera de TV, para inspeção, e os maiores dotados de equipamentos para funções específicas e braços mecânicos, para manutenção. A configuração básica do sistema consiste de um navio mãe, cabo de superfície, garagem, umbilical e o VOR. O veículo deve ter a capacidade de manobrar com precisão no seu ambiente de trabalho e por esta razão é dotado de múltiplos propulsores.
Em geral um VOR tem seis propulsores, sendo encontrados veículos com mais de dez, que são controlados a partir da cabine de controle instalada no navio mãe. Segundo o prof. da UFRJ a experiência nacional no assunto reuniu no Núcleo de Robótica da UFRJ uma equipe multidisciplinar com a participação de especialistas da PUC/RJ. A equipe principal é composta pelos seguintes professores: Luiz Belivaqua (coordenador), Jan Scieszko (manipulação), Miguel Hirata e Carlos da Conceição (hidrodinâmica), Carlos Almeida (umbilical), Liu Hsu e Richard Magdalena (simulação e controle), Edson Watanabe e Walter Suemitsu (acionamento), Jorge de Souza Leão, Aloysio Pedrosa e Otto Duarte (instrumentação e comunicação). O projeto está dividido em cinco partes: computação e instrumentação, navegação e controle, manipulação, propulsão e umbilical.
Edson H. Watanabe é filho de japonês, formou-se Engenheiro Eletrônico pela Escola de Engenharia da UFRJ em 1975, obteve o título de Mestre em Ciências (M.Sc.) na COPPE/UFRJ em 1976 e o título de Doutor em Engenharia (D.Eng.) do Tokyo Institute of Technology, Japão, em 1981. Em 1981 entrou para o Programa de Engenharia Elétrica, da COPPE/UFRJ, como Professor Adjunto, atuando nas áreas de Controle de Máquinas Elétricas assim como Modelagem, Análise e Controle de Conversores. A partir de 1988 passou também a atuar na área de Aplicações de Eletrônica de Potência em Sistemas de Potência. Atualmente é Professor Titular neste mesmo Programa e já orientou 33 teses de Mestrado e 4 de Doutorado e publicou mais de 80 trabalhos em revistas e congressos nacionais e internacionais.
Fonte: http://www.coe.ufrj.br/~watanabe/
acesso em dezembro de 2003
Revista Engenho & Arte, ano1, número 6, setembro/outubro de 1988 página 23